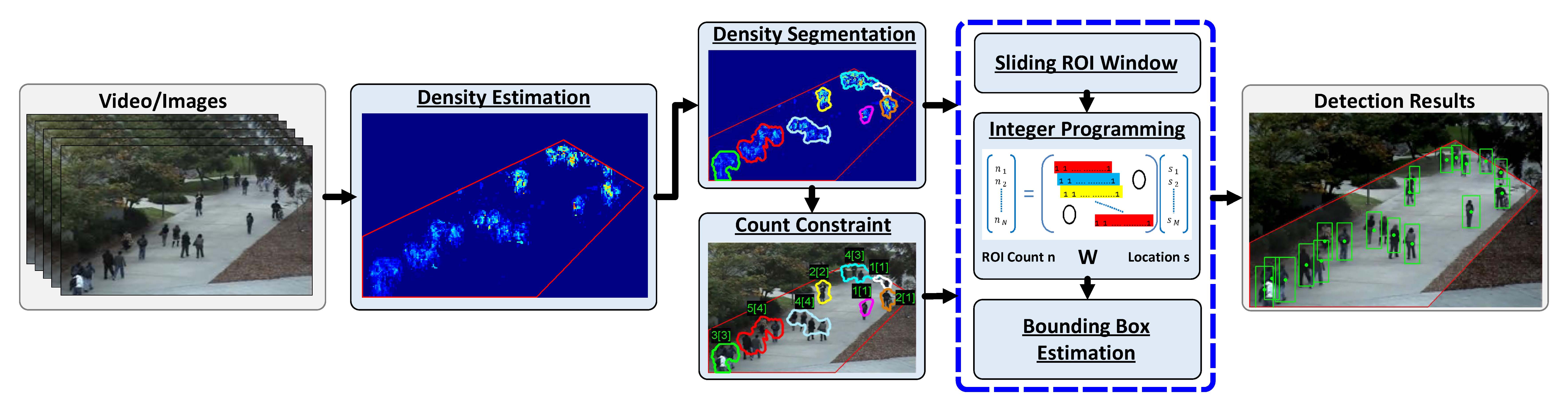
We propose a novel object detection framework for partially-occluded small instances, such as pedestrians in low resolution surveillance video, cells under a microscope, flocks of small animals (e.g. birds, fishes), or even tiny insects like honeybees and flies. These scenarios are very challenging for traditional detectors, which are typically trained on individual instances. In our approach, we first estimate the object density map of the input image, and then divide it into local regions. For each region, a sliding window (ROI) is passed over the density map to calculate the instance count within each ROI. 2D integer programming is used to recover the locations of object instances from the set of ROI counts, and the global count estimate of the density map is used as a constraint to regularize the detection performance. Finally, the bounding box for each instance is estimated using the local density map. Compared with current small-instance detection methods, our proposed approach achieves state-of-the-art performance on several challenging datasets including fluorescence microscopy cell images, UCSD pedestrians, small animals and insects.
Selected Publications
- Small Instance Detection by Integer Programming on Object Density Maps.
,
In: IEEE Conf. Computer Vision and Pattern Recognition (CVPR), Boston, Jun 2015. [extended abstract | dataset]